
IWT, 29/01/2024
Por Scarlett Evans
Correntes elétricas foram usadas para contrair os tecidos musculares, permitindo que o robô em escala reduzida andasse e girasse no lugar.
O robô, criado por uma equipe da Universidade de Tóquio, no Japão, foi modelado com base nos movimentos humanos e pode andar e "girar" para evitar obstáculos.
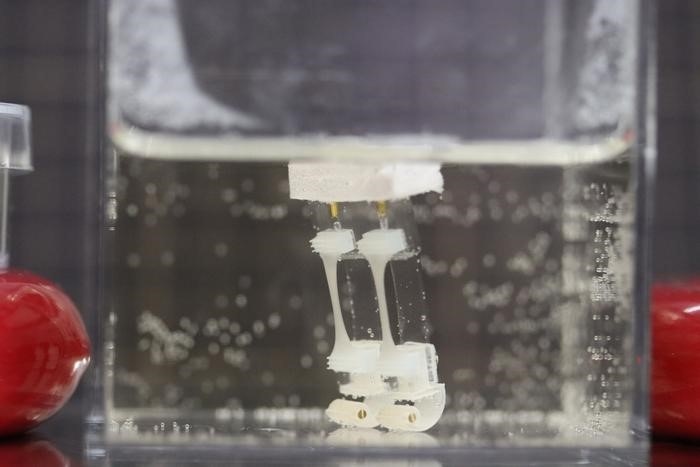
O robô em escala reduzida também pode operar na água, projetado com uma metade superior de espuma para flutuabilidade, e pernas ponderadas para ajudá-lo a ficar em pé, enquanto o chassi é feito de borracha de silicone para aumentar a flexibilidade.
Tiras de tecidos musculares esqueléticos cultivados em laboratório foram então fixadas ao silicone e a cada perna, com correntes elétricas enviadas através do tecido para causar contrações, levantando a perna do robô a cada pulso.
Em uma demonstração em vídeo, a equipe mostrou o robô dando pequenos passos através da água.
O autor do estudo, Shoji Takeuchi, disse que o design da equipe representa um "grande salto" para o campo dos robôs biohíbridos, um campo de pesquisa que combina materiais orgânicos e artificiais para criar robôs de próxima geração.
"A pesquisa em robôs biohíbridos, que são uma fusão de biologia e mecânica, está recentemente chamando a atenção como um novo campo de robótica com função biológica", disse Takeuchi. "Usar músculos como atuadores nos permite construir um robô compacto e alcançar movimentos eficientes, silenciosos e com um toque suave."
A seguir, a equipe disse que integrará articulações e tecidos musculares mais espessos no robô bípede para possibilitar movimentos mais sofisticados e potentes, além de aproveitar eletrodos para aumentar a velocidade do robô.
"Atualmente, estamos movendo manualmente um par de eletrodos para aplicar um campo elétrico individualmente nas pernas, o que leva tempo", disse Takeuchi. "No futuro, ao integrar os eletrodos no robô, esperamos aumentar a velocidade de forma mais eficiente."
No entanto, antes de atualizar o robô, Takeuchi disse que a equipe terá que integrar um sistema de fornecimento de nutrientes para sustentar os tecidos vivos já fixados no chassi do robô, permitindo que ele opere no ar.
Artigos recomendados: Biológico e Molecular
Fonte:https://www.iotworldtoday.com/robotics/researchers-create-two-legged-robot-powered-by-muscle-tissue

Nenhum comentário:
Postar um comentário